PRojects
Senior Design - Unmanned Underwater Vehicle (UUV)

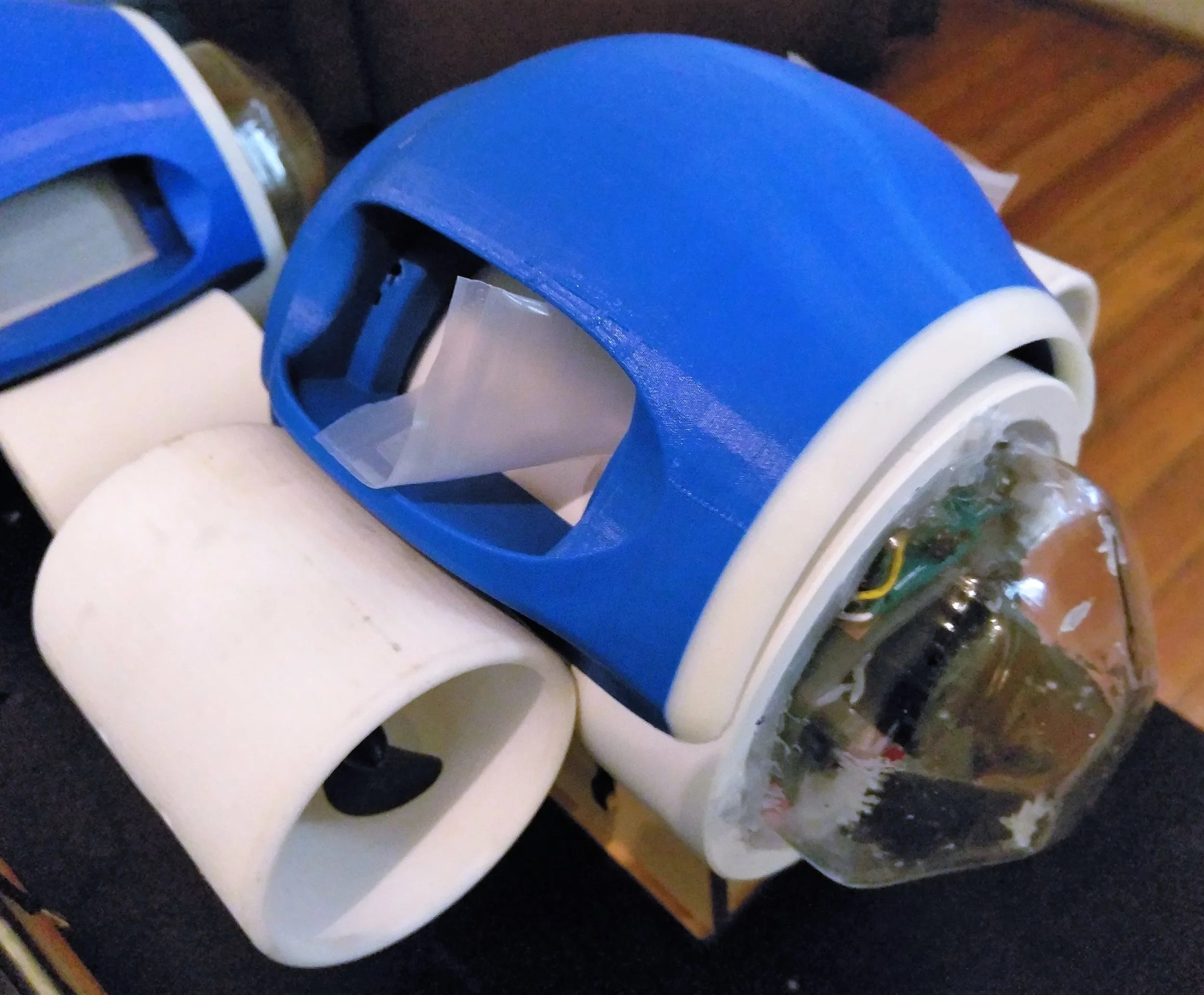







Designed and produced a lightweight autonomous underwater submersible for use in freshwater with an electrical engineering team. Project deliverables included minimum 3 D.O.F. in water, 30-minute battery life, and active environment sensing. Team was able to produce a waterproof equipment drone for under 250$ and a custom 3D printed waterproof thruster assembly.









